11.1. Calculating joint angles from a kinematic acquisition#
In this section, we will calculate the elbow joint angles during the propulsion of a racing wheelchair. At the end of this tutorial, we will plot curves of elbow flexion and pronation angles during the complete acquisition.
Caution
Please be sure to understand the concepts of frame, homogeneous transform, and Euler angles before continuing. If you don’t, start with section 3D rigid body geometry.
Calculating joint angles requires the following steps:
Step 1. Read the marker trajectories.
Step 2. Calculate series of frames that express the orientation of all segments that compose the analyzed joints (how are both segments oriented in space). Here, we calculate frame series for the upper arm and forearm.
Step 3. Express a series of homogeneous transforms between the proximal and distal frames: how the distal (forearm) segment is oriented in space compared to the proximal segment (upper arm);
Step 4. Extract the series of Euler angles from these homogeneous transforms (what series of three angles allow such relative orientation);
Step 5. Interpret these Euler angles as rotations around anatomical axes.
11.1.1. Read and visualize marker trajectories#
We start by downloading and visualizing some data:
import kineticstoolkit.lab as ktk
# Read the markers
markers = ktk.read_c3d(
ktk.doc.download("kinematics_racing_full.c3d")
)["Points"]
# Interconnect markers for easier visualization
interconnections = {
"ArmR": {
"Color": [1, 0.25, 0],
"Links": [
["AcromionR", "MedialEpicondyleR"],
["AcromionR", "LateralEpicondyleR"],
["AcromionR", "OlecraneR"],
],
},
"ForearmR": {
"Color": [1, 0.5, 0],
"Links": [
["MedialEpicondyleR", "RadialStyloidR"],
["MedialEpicondyleR", "UlnarStyloidR"],
["LateralEpicondyleR", "RadialStyloidR"],
["LateralEpicondyleR", "UlnarStyloidR"],
["OlecraneR", "RadialStyloidR"],
["OlecraneR", "UlnarStyloidR"],
["UlnarStyloidR", "RadialStyloidR"],
],
},
}
Showing these markers in the Player:
# Visualize in the player
%matplotlib qt5
p = ktk.Player(markers, interconnections=interconnections)
11.1.2. Create local coordinate systems#
To calculate the elbow angles, we need to express frames for the arm and forearm segments. We will use the recommendations of the International Society of Biomechanics [1] to define these local coordinate systems:
11.1.2.1. Arm coordinate system#
Following the ISB recommendations, the local coordinate system for the humerus is defined as follow:
The origin is GH (glenohumeral joint).
The y axis is the line between GH and the midpoint of EL (lateral elbow epicondyle) and EM (medial elbow epicondyle), pointing to GH.
The x axis is the normal to the GH-EL-EM plane, pointing forward.
The z axis is perpendicular to x and y, pointing to the right.
1. The origin is GH (glenohumeral joint)
We don’t have a marker for the glenohumeral joint, but we have one for the acromion. We will approximate GH by the acromion.
origin = markers.data["AcromionR"]
2. The y axis is the line between GH and the midpoint of EL (lateral elbow epicondyle) and EM (medial elbow epicondyle), pointing to GH
y = markers.data["AcromionR"] - 0.5 * (
markers.data["LateralEpicondyleR"] + markers.data["MedialEpicondyleR"]
)
3. The x axis is the normal to the GH-EL-EM plane, pointing forward
Since x is normal to the GH-EL-EM plane, this plane is a yz plane. We need to define a second vector (other than y) to form this yz plane.
yz = markers.data["LateralEpicondyleR"] - markers.data["MedialEpicondyleR"]
Note that the direction of the yz vector is important. For the plane normal to be forward, the cross product of y and yz must also point forward. In this case, following the right-hand/screw rule, y (upward) cross yz (right) effectively yields a forward vector.
As an easier rule of thumb, look at definition 4: the z vector will point to the right. Then just make the yz vector also point to (grossly) the right since in anatomical position, the right lateral epicondyle is to the right of the right medial epicondyle.
We have now defined everything to create the series of humerus frame. We first create an empty TimeSeries for our frames:
frames = ktk.TimeSeries(time=markers.time)
Now, we will create the ArmR transform series.
frames.data["ArmR"] = ktk.geometry.create_transform_series(positions=origin, y=y, yz=yz)
Let’s visualize it:
p.set_contents(markers.merge(frames))
11.1.2.2. Forearm frame#
We will now proceed with the exact same steps to create the forearm coordinate system. From the ISB [1]:
1. The origin is US (ulnar styloid process).
origin = markers.data["UlnarStyloidR"]
2. The y axis is the line between US and the midpoint between EL and EM, pointing proximally.
y = (
0.5
* (markers.data["LateralEpicondyleR"] + markers.data["MedialEpicondyleR"])
- markers.data["UlnarStyloidR"]
)
3. The x axis is the line perpendicular to the plane through US, RS, and the midpoint between EL and EM, pointing forward.
4. The z axis is perpendicular to x and y, pointing to the right.
This means that US, RS, and the elbow center make a yz plane. Since z will point to the right in anatomical position, we will create a yz vector that points grossly to the right in anatomical position.
yz = markers.data["RadialStyloidR"] - markers.data["UlnarStyloidR"]
We are now ready to create the ForearmR frame series.
frames.data["ForearmR"] = ktk.geometry.create_transform_series(positions=origin, y=y, yz=yz)
Let’s visualize our markers with both new frames:
p.set_contents(markers.merge(frames))
11.1.3. Find the series of homogeneous transforms between both segments#
Now that we have expressed frames for both the arm and forearm, we can find the homogeneous transform between both frames. This is equivalent to expressing the forearm frame in the local coordinates system of the arm.
arm_to_forearm = ktk.geometry.get_local_coordinates(
frames.data["ForearmR"], frames.data["ArmR"]
)
arm_to_forearm
array([[[-0.89251428, -0.28050878, 0.35317572, 0.07386483],
[-0.26421245, 0.95981064, 0.09463257, -0.51046091],
[-0.36552708, -0.0088525 , -0.93075861, 0.00233108],
[ 0. , 0. , 0. , 1. ]],
[[-0.86649378, -0.3588741 , 0.34698403, 0.09357942],
[-0.29827222, 0.92958265, 0.21658664, -0.50065135],
[-0.40027767, 0.08417528, -0.91251976, -0.02194941],
[ 0. , 0. , 0. , 1. ]],
[[-0.83495161, -0.43573721, 0.3361382 , 0.11295463],
[-0.32906148, 0.88488148, 0.32970184, -0.48806881],
[-0.44110583, 0.16467495, -0.88221755, -0.04268811],
[ 0. , 0. , 0. , 1. ]],
...,
[[-0.01705025, -0.97173028, -0.23547728, 0.24257892],
[-0.65770179, -0.16648594, 0.73465011, -0.21229573],
[-0.75308542, 0.1673998 , -0.63627012, -0.04178903],
[ 0. , 0. , 0. , 1. ]],
[[-0.01973518, -0.98060388, -0.19500399, 0.24679806],
[-0.68758197, -0.12828502, 0.71468454, -0.22156369],
[-0.72583852, 0.14818566, -0.67171382, -0.03729532],
[ 0. , 0. , 0. , 1. ]],
[[-0.07302131, -0.99231565, -0.09988766, 0.25412338],
[-0.67941093, -0.02382633, 0.73337105, -0.2485821 ],
[-0.73011552, 0.12141649, -0.67245027, -0.0310937 ],
[ 0. , 0. , 0. , 1. ]]])
11.1.4. Extract the series of Euler angles#
We now have a series of homogeneous matrices, from which we will extract Euler angles corresponding to flexion and pronation. We will use the ktk.geometry.get_angles function to extract these Euler angles. We, however, first need to define the sequence of rotation for these angles. Still following the recommendations of the International Society of Biomechanics [1], we define the series of rotations from the arm to forearm as:
First rotation: Around the humerus’ z axis. Corresponds to a flexion (positive) or hyperextension (negative).
Second rotation: Around the forearm’s rotated x axis. Corresponds to a “carrying angle” due to a tilt in the humeral flexion/extension axis at the humero-ulnar joint and an angulation of the ulna itself.
Third rotation: Around the forearm’s rotated y axis. Corresponds to a pronation (positive) or supination (negative).
These rotations are relative to moving axes (every other rotation is performed around a new frame generated by the previous rotation). Therefore, we will use ‘ZXY’ (capital letters - see ktk.geometry.get_angles for the conventions) as the sequence of rotations.
euler_angles = ktk.geometry.get_angles(arm_to_forearm, "ZXY", degrees=True)
euler_angles
array([[ 16.29122882, -0.50721766, 158.55909435],
[ 21.10954895, 4.82860191, 156.31529458],
[ 26.21675916, 9.47835244, 153.43510186],
...,
[ 99.72205703, 9.63667232, 130.19394543],
[ 97.45324788, 8.52179736, 132.78214513],
[ 91.37545539, 6.97385903, 132.64566069]])
11.1.5. Plot the Euler angles#
Now that we have calculated the angles, we create a last TimeSeries that represents the meaning of these angles.
<Figure size 750x375 with 0 Axes>
angles = ktk.TimeSeries(time=markers.time)
angles.data["Elbow flexion"] = euler_angles[:, 0]
angles.data["Forearm pronation"] = euler_angles[:, 2]
angles = angles.add_info("Elbow flexion", "Unit", "deg")
angles = angles.add_info("Forearm pronation", "Unit", "deg")
angles.plot()
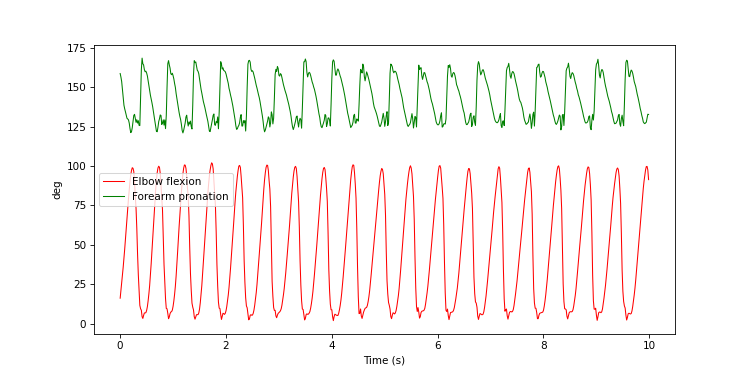
From this curve, we can now see that the elbow goes from a total extension to a flexion of about 100 degrees, while the forearm stays in a pronated angle of about 125 to 170 degrees (defined from a fully supinated position in anatomical position).
The process would be identical for any joint:
Create the series of reference frames for the two segments that compose the analyzed joint;
Express the series of rigid transforms from the proximal to distal joint;
Extract the series of Euler angles from these rigid transforms;
Interpret these Euler angle as anatomical rotation.